Empowering Future Innovators
AI + 3D Printing
The Deep Integration of Hardware, Coding, and Large Language Models. Bridging the gap between screen code and physical feedback.
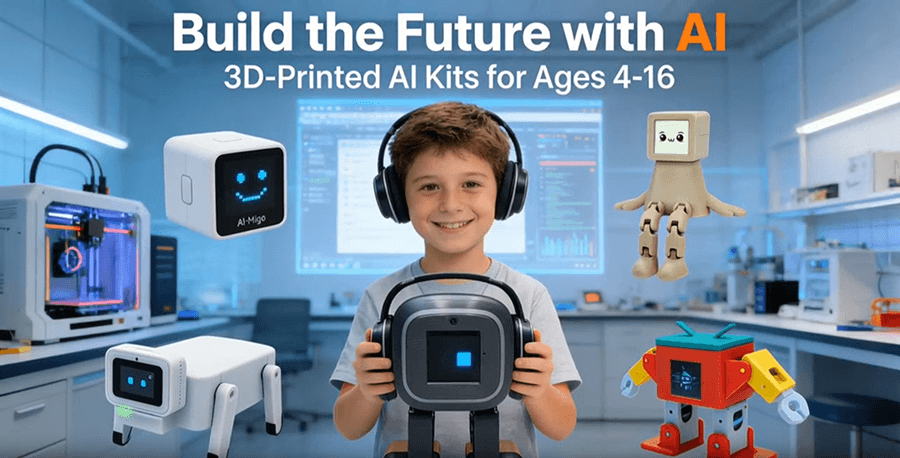
Vision: Next-Generation K-12 AI Education
Creative Kits
Modular hardware platforms designed for rapid AI deployment. From humanoid robotics to ambient workspace assistants.
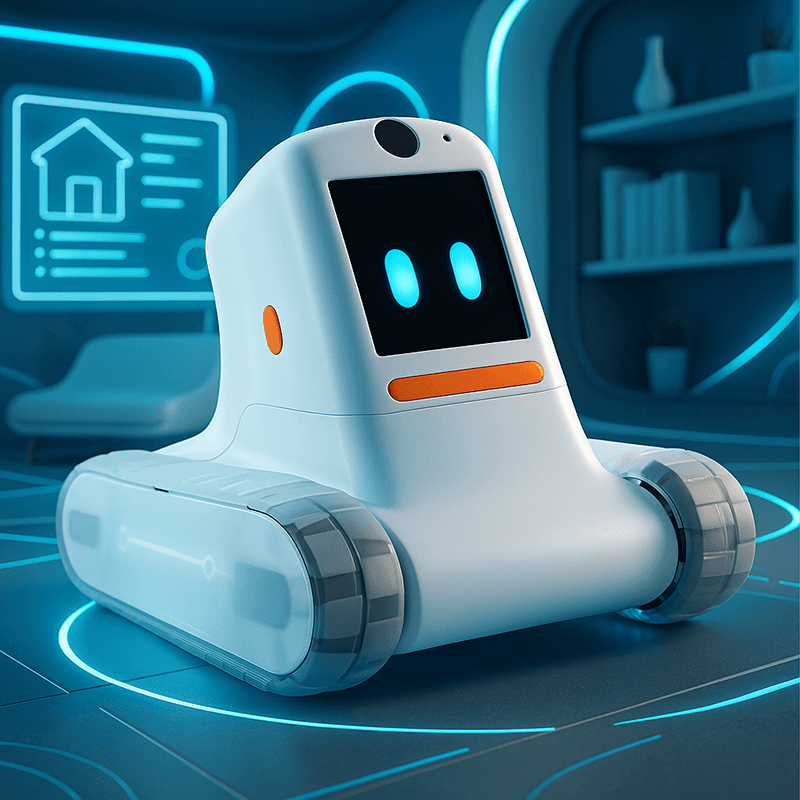
P-BOT-02 Tracked Robot Kit
An AI-interactive robot powered by ESP32-S3R8, supporting voice control, gesture recognition, vision and path planning. Designed for students aged 6-12, bundled with a 32-lesson curriculum.
Specs arrow_forward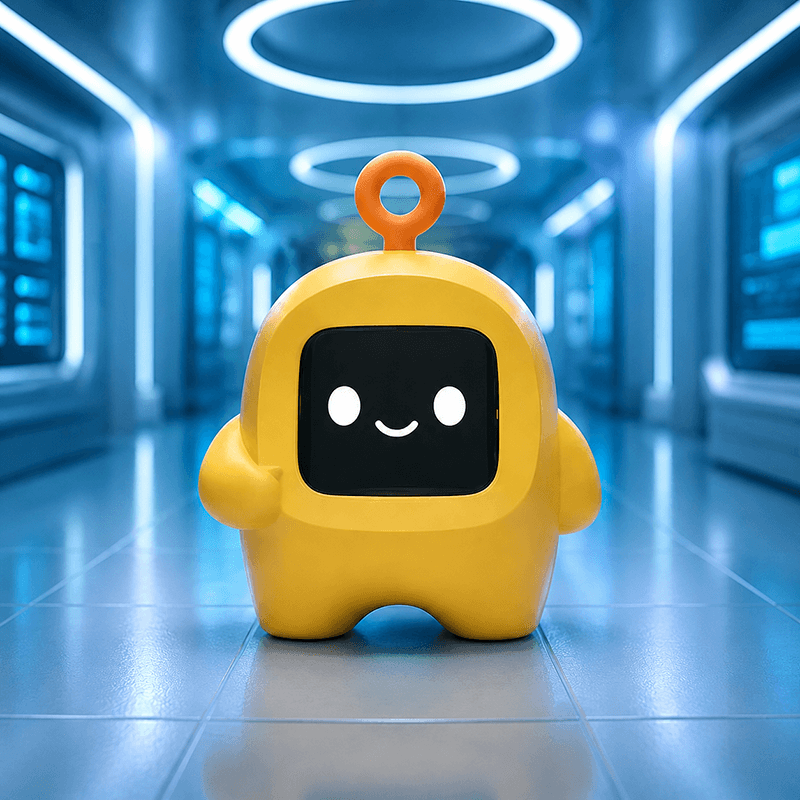
P-BOT-01 Humanoid Kit
An ESP32-S3 based full-scenario agent platform for ages 5-10. Combines multi-sensor perception, LLM-driven logic and block-based programming with 16 progressive lessons.
Specs arrow_forward
P-BOT-03 Smart Robot Kit
An ESP32S3 multimodal robot platform for ages 6-12. Built on vision recognition, servo-based gait control, multimodal interaction and block-based programming, with 16 progressive lessons.
Specs arrow_forward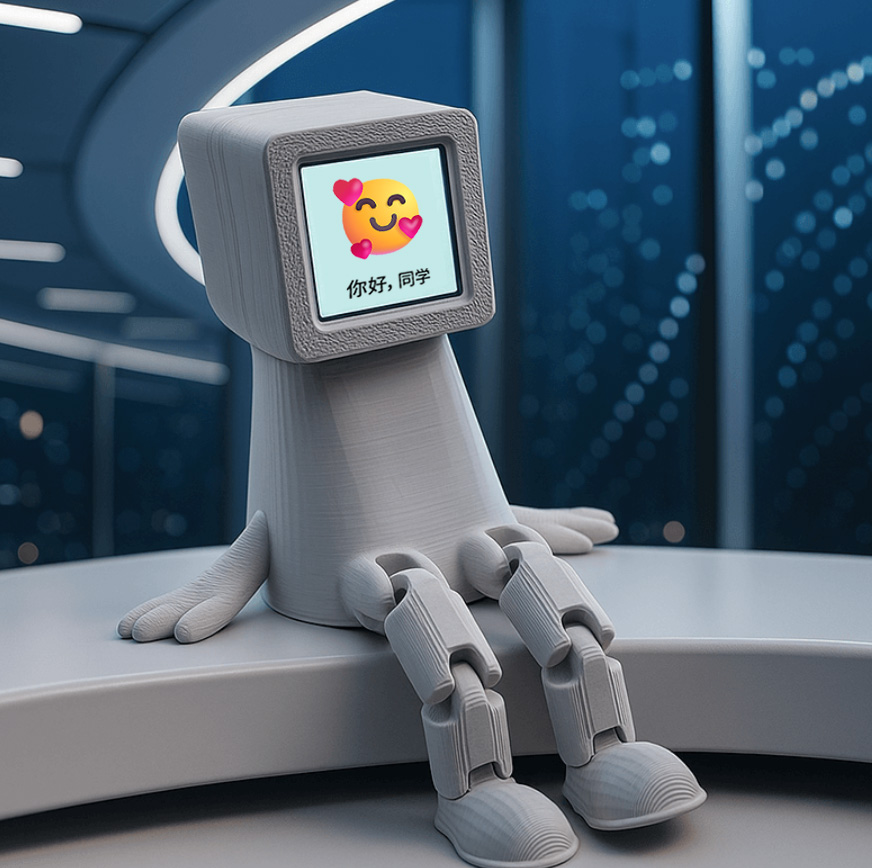
DIY Agent Humanoid Kit
An ESP32-S3R8 based AI-interactive robot with offline voice wake-up and LLM chat. Integrates an LCD and hi-fi audio system. Designed for ages 6-12 with a 16-lesson curriculum.
Specs arrow_forward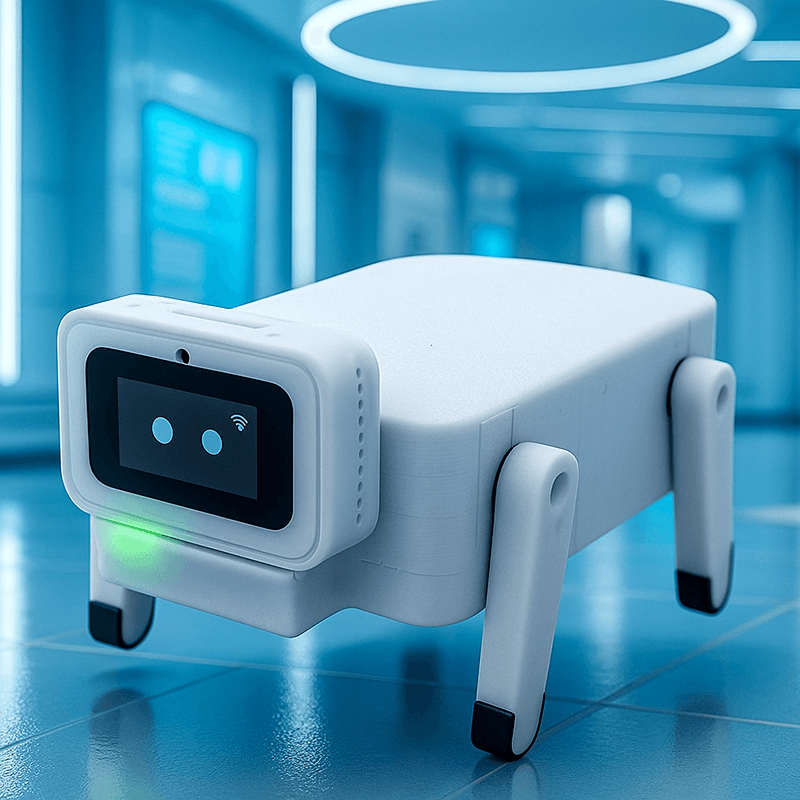
DIY Agent Robot Dog Kit
An ESP32-C3 based AI content-creation and programming platform. Supports LLM integration and multi-sensor feedback. Fits ages 6-12 to cultivate AI application skills.
Specs arrow_forward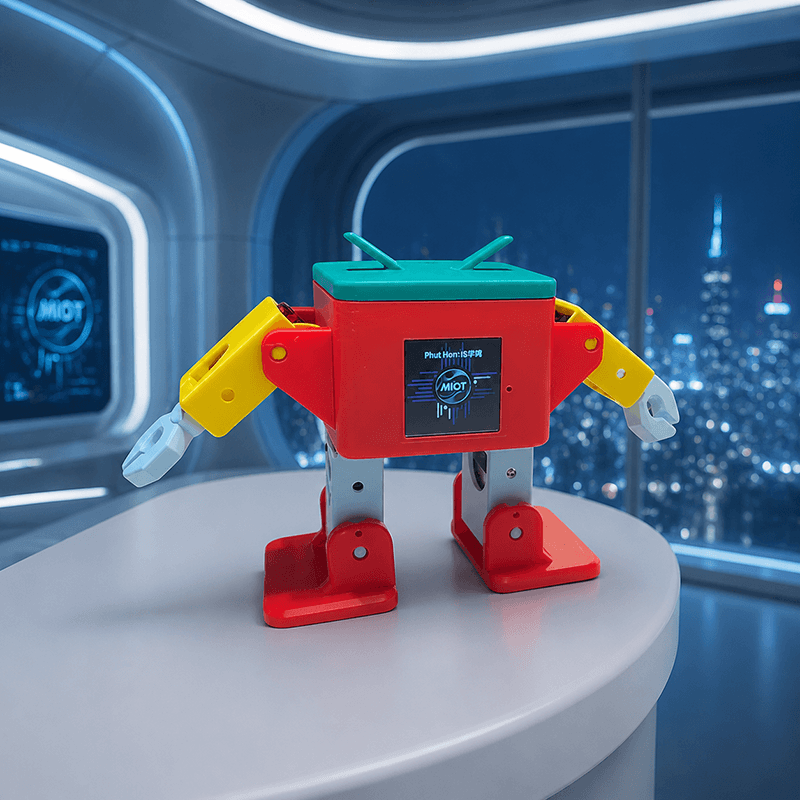
DIY Agent Bipedal Robot Kit
An ESP32S3 bipedal robot platform for ages 6-12. Built on servo gait control, multimodal interaction and block-based programming, with a 16-lesson progressive curriculum.
Specs arrow_forwardOpen Source & Customization
Full Source Code
From firmware to top-level AI logic — every line is open and updated in real time.
Comprehensive Docs
Includes 3D printing sources, assembly guides and supporting course materials.
import aura_sdk
# Initialize the desktop companion
robot = aura_sdk.Companion()
# Enable LLM-driven vision recognition
robot.vision.enable_detection("object")
robot.speech.say("New target detected, ready to interact.")
# Print 3D chassis specs
print(robot.get_chassis_specs())